
Co je kamera RGB D?
souhrn
RGB-D obecně odkazuje na červené, zelené, modré plus hloubkové údaje zachycené senzory RGB-D senzory. Obrázek RGB-D poskytuje informace o hloubce pixelů zarovnané s odpovídajícími obrazovými pixely.
Abstrakt – Kamery Lidar a RGB se běžně používají senzory v autonomních vozidlech. Oba však mají omezení: Lidar poskytuje přesnou hloubku, ale je řídká ve svislém a horizontálním rozlišení; Obrázky RGB poskytují hustou texturu, ale postrádají informace o hloubce.
Přesnost obou systémů byla přibližně 1.00, což je klinicky přijatelné.
Senzory spotřebitelů RGB-D: Tyto senzory však stojí kolem 10 000 $. Naproti tomu nové spotřebitelské senzory RGB-D stojí méně než 200 $. Technologie snímání hloubky na pixely, která se používá ve spotřebitelských kamerech RGB-D, byla vyvinuta společností Primesen.
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
Přidání dat RGB do 3D hloubkové kamery bodového cloudu nebo hloubky umožňuje efektivněji určit objekty pro rozpoznávání nebo detekci vzorů. To je zvláště užitečné v aplikacích, které potřebují identifikovat typ a povahu objektů ve scéně spolu s měřením hloubky pro ně.
Lidar vs kamery: Základním rozdílem mezi technologií Lidar a kamery je to, že Lidar vydává světlo, které vidí, zatímco kamery ne. To dává Lidarovi schopnost vypočítat neuvěřitelně přesné vzdálenosti mnoha objektům, které jsou současně detekovány.
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
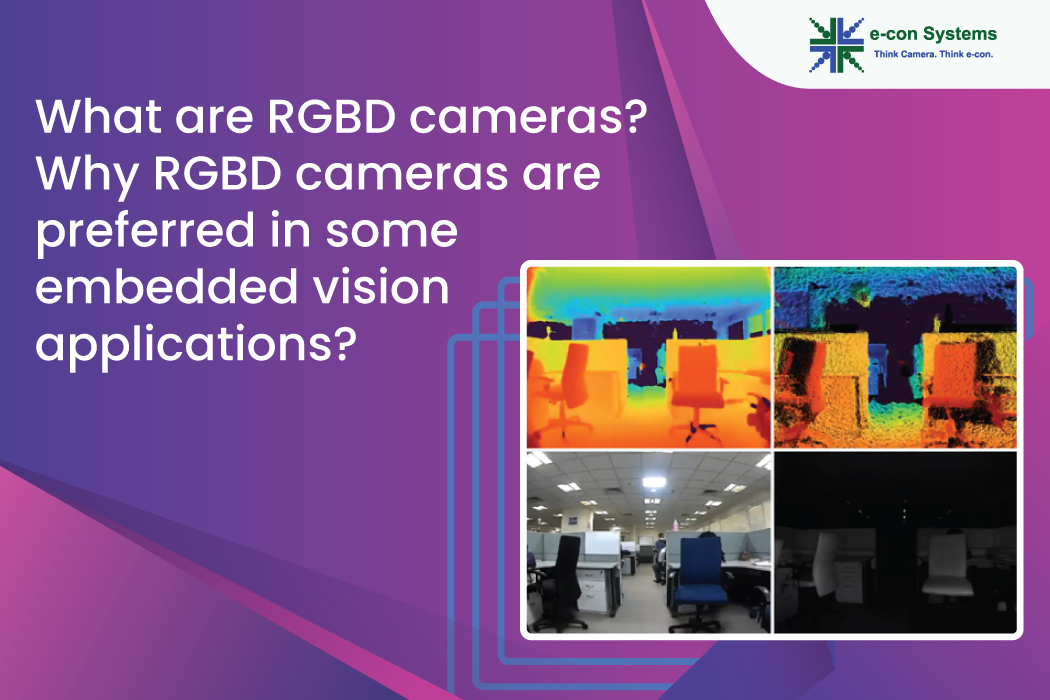
Obrázek RGB-D je jednoduše kombinací obrazu RGB a jeho odpovídajícího obrazu hloubky. Hloubkový obrázek je obrazový kanál, ve kterém se každý pixel vztahuje na vzdálenost mezi rovinou obrazu a odpovídajícím objektem v obrázku RGB.
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
Nejmenším komerčně dostupným obrazovým senzorem je OV6948, měří 0.575 mm x 0.575 mm x 0.232 mm, vyrobené společností Omnivision Technologies, Inc. (USA).
Otázky a odpovědi
1. Co znamená RGBD na kameře?
RGB-D obecně odkazuje na červené, zelené, modré plus hloubkové údaje zachycené senzory RGB-D senzory. Obrázek RGB-D poskytuje informace o hloubce pixelů zarovnané s odpovídajícími obrazovými pixely.
2. Jaký je rozdíl mezi kamerou RGB-D a Lidar?
Abstrakt – Kamery Lidar a RGB se běžně používají senzory v autonomních vozidlech. Oba však mají omezení: Lidar poskytuje přesnou hloubku, ale je řídká ve svislém a horizontálním rozlišení; Obrázky RGB poskytují hustou texturu, ale postrádají informace o hloubce.
3. Jak přesná je kamera RGB-D?
Přesnost obou systémů byla přibližně 1.00, což je klinicky přijatelné.
4. Kolik stojí RGB-D kamery?
Senzory spotřebitelů RGB-D: Tyto senzory však stojí kolem 10 000 $. Naproti tomu nové spotřebitelské senzory RGB-D stojí méně než 200 $. Technologie snímání hloubky na pixely, která se používá ve spotřebitelských kamerech RGB-D, byla vyvinuta společností Primesen.
5. Jaké jsou nevýhody kamery RGB-D?
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
6. Jaké jsou výhody kamer RGB-D?
Přidání dat RGB do 3D hloubkové kamery bodového cloudu nebo hloubky umožňuje efektivněji určit objekty pro rozpoznávání nebo detekci vzorů. To je zvláště užitečné v aplikacích, které potřebují identifikovat typ a povahu objektů ve scéně spolu s měřením hloubky pro ně.
7. Což je lepší lidar nebo kamery?
Lidar vs kamery: Základním rozdílem mezi technologií Lidar a kamery je to, že Lidar vydává světlo, které vidí, zatímco kamery ne. To dává Lidarovi schopnost vypočítat neuvěřitelně přesné vzdálenosti mnoha objektům, které jsou současně detekovány.
8. Jaké jsou nevýhody kamery RGB-D?
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
9. Jaký je rozdíl mezi RGB a RGB-D?
Obrázek RGB-D je jednoduše kombinací obrazu RGB a jeho odpovídajícího obrazu hloubky. Hloubkový obrázek je obrazový kanál, ve kterém se každý pixel vztahuje na vzdálenost mezi rovinou obrazu a odpovídajícím objektem v obrázku RGB.
10. Jaké jsou nevýhody kamery RGB-D?
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém rušení snižuje kvalitu odhadované hloubkové mapy.
11. Co je nejmenší kamera RGB?
Nejmenším komerčně dostupným obrazovým senzorem je OV6948, měří 0.575 mm x 0.575 mm x 0.232 mm, vyrobené společností Omnivision Technologies, Inc. (USA).
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Co znamená RGBD na kameře
RGB-D obecně odkazuje na červené, zelené, modré plus hloubkové údaje zachycené senzory RGB-D senzory. Obrázek RGB-D poskytuje informace o hloubce pixelů zarovnané s odpovídajícími obrazovými pixely.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaký je rozdíl mezi kamerou RGB-D a Lidar
Abstrakt – Kamery Lidar a RGB se běžně používají senzory v autonomních vozidlech. Oba však mají omezení: Lidar poskytuje přesnou hloubku, ale je řídká ve svislém a horizontálním rozlišení; Obrázky RGB poskytují hustou texturu, ale postrádají informace o hloubce.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jak přesná je RGB-D fotoaparát
Přesnost obou systémů byla přibližně 1.00, což je klinicky přijatelné.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Kolik stojí RGB-D kamery
Senzory spotřebitelů RGB-D
Tyto senzory však stojí kolem 10 000 $. Naproti tomu nové spotřebitelské senzory RGB-D stojí méně než 200 $. Technologie snímání hloubky na pixely, která se používá v kamer spotřebitelů RGB-D, byla vyvinuta společností Primesense (http: // www.Primesense.com/en/Technology/115-the-Primesense-3D-Sensing-Solution).
V mezipaměti
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou nevýhody kamery RGB-D
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém s rušením snižuje kvalitu odhadované hloubkové mapy.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou výhody kamer RGBD
Přidání dat RGB do 3D hloubkové kamery bodového cloudu nebo hloubky umožňuje efektivněji určit objekty pro rozpoznávání nebo detekci vzorů. To je zvláště užitečné v aplikacích, které potřebují identifikovat typ a povahu objektů ve scéně spolu s měřením hloubky pro ně.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Což je lepší lidar nebo kamery
Lidar vs kamery
Základním rozdílem mezi technologií Lidar a kamery je však to, že Lidar vydává světlo, které vidí, zatímco kamery ne. To dává Lidarovi schopnost vypočítat neuvěřitelně přesné vzdálenosti mnoha objektům, které jsou současně detekovány.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou nevýhody kamery RGB-D
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém s rušením snižuje kvalitu odhadované hloubkové mapy.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaký je rozdíl mezi RGB a RGB-D
Obrázek RGB-D je jednoduše kombinací obrazu RGB a jeho odpovídajícího obrazu hloubky. Hloubkový obrázek je obrazový kanál, ve kterém se každý pixel vztahuje na vzdálenost mezi rovinou obrazu a odpovídajícím objektem v obrázku RGB.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou nevýhody kamery RGB D
Jak je uvedeno výše, kamera RGB-D nedokáže zachytit objekty a povrchy vyrobené z průhledných, reflexních a absorpčních materiálů. Kromě toho, když se k pohledu na stejnou scénu používají alespoň dvě kamery, problém s rušením snižuje kvalitu odhadované hloubkové mapy.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Co je nejmenší kamera RGB
Nejmenším komerčně dostupným obrazovým senzorem je OV6948, měří 0.575 mm x 0.575 mm x 0.232 mm, vyrobené společností Omnivision Technologies, Inc. (USA). Záznam je založen na testování produktů a průzkumu trhu prováděného průzkumem trhu s transparentností v Indii Pune v Pune 10. dubna 2019.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Je RGB dobrý pro oči
Odpověď je ne. O osvětlení RGB a osvětlení LED není nic zvláštního, světlo je světlo a pokud je intenzita viditelného světla v bezpečných limitch, nikomu neublíží oči. Pokud vůbec něco, světla RGB jsou jako LED světla v tom, že jsou bezpečnější, protože nevyrábějí UV světlo.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaký je rozdíl mezi hloubkovou kamerou a kamerou RGB
Informace o hloubce lze získat pomocí hloubkové mapy/obrázku, který je vytvořen 3D hloubkovým senzorem, jako je stereo senzor nebo čas letu. RGBD fotoaparáty jsou schopny provést sloučení dat RGB na pixel-to-pixel, aby byly poskytovány oba v jednom rámci.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jak funguje senzor RGBD
Senzory RGB-D jsou specifickým typem zařízení pro snímání hloubky, které pracují ve spojení s senzorovou kamerou RGB (červená, zelená a modrá barva). Jsou schopni rozšířit konvenční obraz informacemi o hloubce (související se vzdáleností ke senzoru) na základě pixelů.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaká je nevýhoda Lidaru
Další nevýhodou použití dat LiDAR pro analýzu terénu je obtížnost a nejistota interpretace a analýzy dat. Data LiDAR mohou poskytnout bohaté a podrobné informace o terénu, ale může být také nejednoznačné a složité interpretovat a analyzovat.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou nevýhody kamery Lidar
– Omezení dronů Lidarmuch větší investice do vybavení (ve srovnání s jinými technologiemi), takže i když je ekonomické při použití na velkých měřítcích, může být pro zachycení dat v menších oblastech drahé.Přesnost je vysoce závislá na kvalitě a kalibraci komponent systému IMU a GNSS.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Co je senzor argb d
Senzory RGB-D jsou specifickým typem zařízení pro snímání hloubky, které pracují ve spojení s senzorovou kamerou RGB (červená, zelená a modrá barva). Jsou schopni rozšířit konvenční obraz informacemi o hloubce (související se vzdáleností ke senzoru) na základě pixelů.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaký je rozdíl mezi RGB a RGB D
Obrázek RGB-D je jednoduše kombinací obrazu RGB a jeho odpovídajícího obrazu hloubky. Hloubkový obrázek je obrazový kanál, ve kterém se každý pixel vztahuje na vzdálenost mezi rovinou obrazu a odpovídajícím objektem v obrázku RGB. Kinect můžete použít k zachycení takových obrázků RGB-D.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaká je nejnižší kvalita fotoaparátu
256×256 – Nachází se na velmi levných kamerách, toto rozlišení je tak nízké, že kvalita obrazu je téměř vždy nepřijatelná. To je celkem 65 000 pixelů. 640×480 – Toto je dolní konec na většině "nemovitý" Kamery. Toto rozlišení je ideální pro e-mailové obrázky nebo zveřejňování obrázků na webu.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Co je nejjednodušší kamera na světě
Meet Solarcan Puck – nejjednodušší kamera na světě.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké jsou nevýhody RGB
RGB Consnot průmyslový standard – běžnější v webovém designu než tisk.Ne každý bude pracovat s obrázky RGB.Opírá se poněkud na světlo, které tisk neposkytuje jako monitor počítače.Může být mírný přechod z obrazovky na tisk.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaké je nejlepší nastavení RGB pro oči
Normálně chcete mít kontrast 1: 1000. Nejjasnější místo bude emitovat 1000x více světla než nejtemnější místo. To je v pořádku, protože čím vyšší je kontrast, tím náročnější bude pro vaše oči.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Jaký je rozdíl mezi obrazem RGB a obrazem hloubky
Obrázek RGB-D je jednoduše kombinací obrazu RGB a jeho odpovídajícího obrazu hloubky. Hloubkový obrázek je obrazový kanál, ve kterém se každý pixel vztahuje na vzdálenost mezi rovinou obrazu a odpovídajícím objektem v obrázku RGB.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Proč je Elon Musk proti Lidaru
První je, že je to velmi drahé. Druhý, na druhé straně, je téměř filozofický. Sám Musk vysvětlil, že „montážní lidary na autě znamená naplnění drahých příloh. Ale na autě je každé přidané příslušenství špatnou věcí: je směšné naplnit auto těmito zařízeními.
[/WPRemark]
[WPREMARK PRESET_NAME = “CHAT_MESSAGE_1_MY” ICON_SHOW = “0” ACHOLIGHT_COLOR = “#E0F3FF” Padding_RIGHT = “30” Padding_left = “30” Border_Radius = “30”] Proč Tesla přestal používat Lidar
Říká také, že jakákoli společnost, která se spoléhá na tento typ technologie, je odsouzena. Tvrdí, že Lidar je příliš drahý a že mapování světa a jeho udržování je příliš nákladné. Místo toho se Tesla zaměřuje na systémy založené na vidění, o kterých věří, že jsou efektivnější a nákladově efektivnější.
[/WPRemark]

