
¿Qué es la cámara RGB D??
Resumen
RGB-D generalmente se refiere a datos de profundidad rojo, verde, azul más capturado por RGB-D Sensors. Una imagen RGB-D proporciona una información de profundidad por píxel alineada con los píxeles de imagen correspondientes.
Resumen: las cámaras Lidar y RGB son sensores de uso común en vehículos autónomos. Sin embargo, ambos tienen limitaciones: LiDAR proporciona una profundidad precisa pero es escasa en la resolución vertical y horizontal; Las imágenes RGB proporcionan textura densa pero carecen de información de profundidad.
La precisión de ambos sistemas fue de aproximadamente 1.00, que es clínicamente aceptable.
Sensores de consumo RGB-D: sin embargo, estos sensores cuestan alrededor de $ 10,000 cada uno. Por el contrario, los nuevos sensores de consumo RGB-D cuestan menos de $ 200. La tecnología de detección de profundidad por píxel que se utiliza en las cámaras RGB-D de consumo fue desarrollada por Primesense.
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
Agregar datos RGB al mapa de la nube o profundidad de la cámara de detección de una cámara de profundidad 3D permite identificar objetos de manera más efectiva para el reconocimiento o detección de patrones. Esto es particularmente útil en aplicaciones que necesitan identificar el tipo y la naturaleza de los objetos en la escena junto con medirles la profundidad.
Cámaras LiDAR vs: sin embargo, la diferencia fundamental entre LiDAR y la tecnología de la cámara es que LiDAR emite la luz que ve, mientras que las cámaras no. Esto le da a Lidar la capacidad de calcular distancias increíblemente precisas a muchos objetos que se detectan simultáneamente.
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
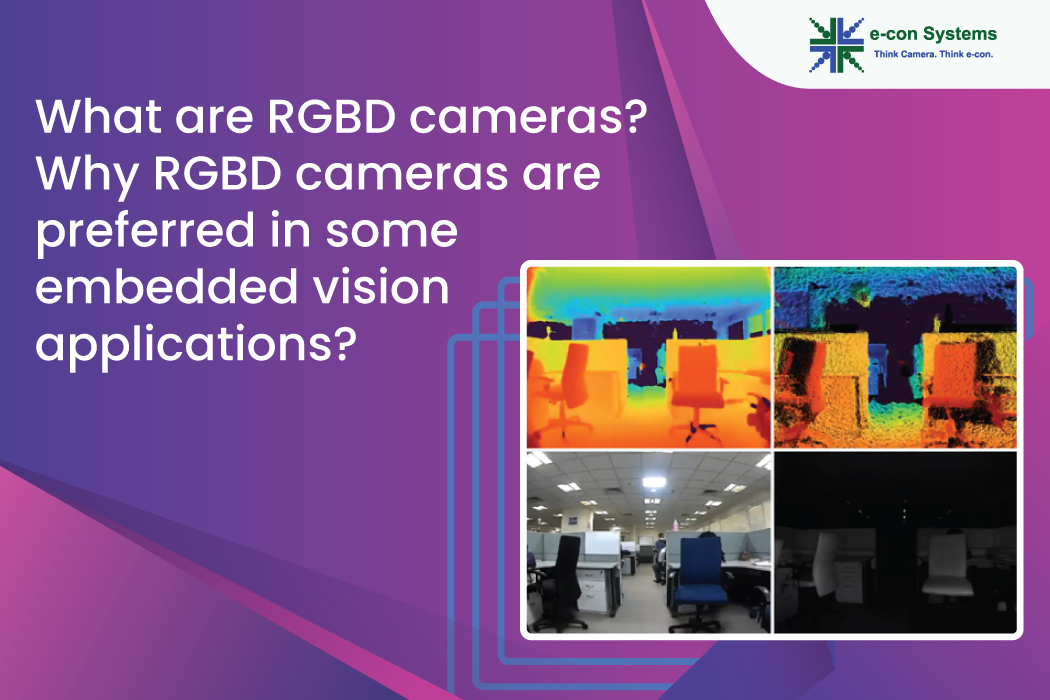
Una imagen RGB-D es simplemente una combinación de una imagen RGB y su imagen de profundidad correspondiente. Una imagen de profundidad es un canal de imagen en el que cada píxel se relaciona con una distancia entre el plano de imagen y el objeto correspondiente en la imagen RGB.
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
El sensor de imagen más pequeño comercialmente disponible es el OV6948, que mide 0.575 mm x 0.575 mm x 0.232 mm, hecho por Omnivision Technologies, Inc. (EE.UU).
Preguntas y respuestas
1. ¿Qué significa RGBD en una cámara??
RGB-D generalmente se refiere a datos de profundidad rojo, verde, azul más capturado por RGB-D Sensors. Una imagen RGB-D proporciona una información de profundidad por píxel alineada con los píxeles de imagen correspondientes.
2. ¿Cuál es la diferencia entre la cámara RGB-D y Lidar?
Resumen: las cámaras Lidar y RGB son sensores de uso común en vehículos autónomos. Sin embargo, ambos tienen limitaciones: LiDAR proporciona una profundidad precisa pero es escasa en la resolución vertical y horizontal; Las imágenes RGB proporcionan textura densa pero carecen de información de profundidad.
3. Qué precisa es una cámara RGB-D?
La precisión de ambos sistemas fue de aproximadamente 1.00, que es clínicamente aceptable.
4. ¿Cuánto cuesta las cámaras RGB-D??
Sensores de consumo RGB-D: sin embargo, estos sensores cuestan alrededor de $ 10,000 cada uno. Por el contrario, los nuevos sensores de consumo RGB-D cuestan menos de $ 200. La tecnología de detección de profundidad por píxel que se utiliza en las cámaras RGB-D de consumo fue desarrollada por Primesense.
5. ¿Cuáles son las desventajas de la cámara RGB-D??
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
6. ¿Cuáles son las ventajas de las cámaras RGB-D??
Agregar datos RGB al mapa de la nube o profundidad de la cámara de detección de una cámara de profundidad 3D permite identificar objetos de manera más efectiva para el reconocimiento o detección de patrones. Esto es particularmente útil en aplicaciones que necesitan identificar el tipo y la naturaleza de los objetos en la escena junto con medirles la profundidad.
7. Que es mejor lidar o cámaras?
Cámaras LiDAR vs: sin embargo, la diferencia fundamental entre LiDAR y la tecnología de la cámara es que LiDAR emite la luz que ve, mientras que las cámaras no. Esto le da a Lidar la capacidad de calcular distancias increíblemente precisas a muchos objetos que se detectan simultáneamente.
8. ¿Cuáles son las desventajas de la cámara RGB-D??
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
9. ¿Cuál es la diferencia entre RGB y RGB-D??
Una imagen RGB-D es simplemente una combinación de una imagen RGB y su imagen de profundidad correspondiente. Una imagen de profundidad es un canal de imagen en el que cada píxel se relaciona con una distancia entre el plano de imagen y el objeto correspondiente en la imagen RGB.
10. ¿Cuáles son las desventajas de la cámara RGB-D??
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y de absorción. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
11. ¿Cuál es la cámara RGB más pequeña??
El sensor de imagen más pequeño comercialmente disponible es el OV6948, que mide 0.575 mm x 0.575 mm x 0.232 mm, hecho por Omnivision Technologies, Inc. (EE.UU).
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Qué significa RGBD en la cámara?
RGB-D generalmente se refiere a datos de profundidad rojo, verde, azul más capturado por RGB-D Sensors. Una imagen RGB-D proporciona una información de profundidad por píxel alineada con los píxeles de imagen correspondientes.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la diferencia entre la cámara RGB-D y Lidar
Resumen: las cámaras Lidar y RGB son sensores de uso común en vehículos autónomos. Sin embargo, ambos tienen limitaciones: LiDAR proporciona una profundidad precisa pero es escasa en la resolución vertical y horizontal; Las imágenes RGB proporcionan textura densa pero carecen de información de profundidad.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Qué tan precisa es la cámara RGB-D?
La precisión de ambos sistemas fue de aproximadamente 1.00, que es clínicamente aceptable.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuánto cuesta las cámaras RGB-D?
Sensores de consumo RGB-D
Sin embargo, estos sensores cuestan alrededor de $ 10,000 cada uno. Por el contrario, los nuevos sensores de consumo RGB-D cuestan menos de $ 200. La tecnología de detección de profundidad por píxel que se utiliza en las cámaras RGB-D de consumo fue desarrollada por Primesense (http: // www.primossense.com/en/tecnología/115-the-finsense-3d-sensación de sensación).
Cacheedsimilar
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son las desventajas de la cámara RGB-D?
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y absorbentes. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son las ventajas de las cámaras RGBD?
Agregar datos RGB al mapa de la nube o profundidad de la cámara de detección de una cámara de profundidad 3D permite identificar objetos de manera más efectiva para el reconocimiento o detección de patrones. Esto es particularmente útil en aplicaciones que necesitan identificar el tipo y la naturaleza de los objetos en la escena junto con medirles la profundidad.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] Que es mejor lidar o cámaras
Lidar vs cámaras
Sin embargo, la diferencia fundamental entre LiDAR y la tecnología de la cámara es que LiDAR emite la luz que ve, mientras que las cámaras no. Esto le da a Lidar la capacidad de calcular distancias increíblemente precisas a muchos objetos que se detectan simultáneamente.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son las desventajas de la cámara RGB-D?
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y absorbentes. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la diferencia entre RGB y RGB-D?
Una imagen RGB-D es simplemente una combinación de una imagen RGB y su imagen de profundidad correspondiente. Una imagen de profundidad es un canal de imagen en el que cada píxel se relaciona con una distancia entre el plano de imagen y el objeto correspondiente en la imagen RGB.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son las desventajas de la cámara RGB D?
Como se mencionó anteriormente, la cámara RGB-D no puede capturar objetos y superficies hechas de materiales transparentes, reflectantes y absorbentes. Además, cuando se usan al menos dos cámaras para ver la misma escena, el problema de interferencia disminuye la calidad del mapa de profundidad estimado.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la cámara RGB más pequeña?
El sensor de imagen más pequeño comercialmente disponible es el OV6948, que mide 0.575 mm x 0.575 mm x 0.232 mm, hecho por Omnivision Technologies, Inc. (EE.UU). El registro se basa en pruebas de productos e investigación de mercado realizada por la investigación de mercado de Transparencia en Pune, India, el 10 de abril de 2019.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] Es rgb bueno para los ojos
La respuesta es no. No hay nada especial en la iluminación RGB y la iluminación LED, la luz es ligera, y mientras la intensidad de la luz visible esté dentro de los límites seguros, no dañará los ojos de nadie. En todo caso, las luces RGB son como luces LED en que son más seguras porque no producen luz UV.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la diferencia entre la cámara de profundidad y la cámara RGB?
La información de profundidad se puede recuperar a través de un mapa/imagen de profundidad creada por un sensor de profundidad 3D, como un sensor estéreo o una hora del sensor de vuelo. Las cámaras RGBD pueden hacer una fusión de píxel a píxel de datos RGB e información de profundidad para entregar ambos en un solo cuadro.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cómo funciona el sensor RGBD?
Los sensores RGB-D son un tipo específico de dispositivos de detección de profundidad que funcionan en asociación con una cámara de sensor RGB (color rojo, verde y azul). Son capaces de aumentar la imagen convencional con información de profundidad (relacionada con la distancia al sensor) por píxel.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es el inconveniente de Lidar?
Otra desventaja del uso de datos LIDAR para el análisis de terreno es la dificultad y la incertidumbre de la interpretación y el análisis de los datos. Los datos de LiDAR pueden proporcionar información rica y detallada sobre el terreno, pero también puede ser ambiguo y complejo de interpretar y analizar.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son las desventajas de la cámara LiDAR?
– Limitaciones de la inversión de drones más grande en equipos (en comparación con otras tecnologías), por lo que aunque económico cuando se usa a grandes escalas, puede ser costoso para capturar datos en áreas más pequeñas.La precisión depende en gran medida de la calidad y la calibración de los componentes del escáner, IMU y GNSS del sistema.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Qué es el sensor argb d?
Los sensores RGB-D son un tipo específico de dispositivos de detección de profundidad que funcionan en asociación con una cámara de sensor RGB (color rojo, verde y azul). Son capaces de aumentar la imagen convencional con información de profundidad (relacionada con la distancia al sensor) por píxel.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la diferencia entre RGB y RGB D
Una imagen RGB-D es simplemente una combinación de una imagen RGB y su imagen de profundidad correspondiente. Una imagen de profundidad es un canal de imagen en el que cada píxel se relaciona con una distancia entre el plano de imagen y el objeto correspondiente en la imagen RGB. Puede usar Kinect para capturar tales imágenes RGB-D.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la calidad de la cámara más baja?
256×256 – Se encuentra en cámaras muy baratas, esta resolución es tan baja que la calidad de la imagen es casi siempre inaceptable. Esto es 65,000 píxeles totales. 640×480 – Este es el extremo bajo en la mayoría "real" cámaras. Esta resolución es ideal para enviar imágenes por correo electrónico o publicar imágenes en un sitio web.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la cámara más simple del mundo?
Conoce a SolarCan Puck: la cámara más simple del mundo.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuáles son los contras de RGB?
RGB CONSNOT El estándar de la industria: más común en el diseño web que la impresión.No todos trabajarán con imágenes RGB.Se basa un poco a la luz, que la impresión no proporciona como lo hace un monitor de computadora.Podría ser un ligero cambio de color de la pantalla a la impresión.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la mejor configuración RGB para los ojos?
Normalmente, desea tener un contraste de 1: 1000. El lugar más brillante emitirá 1000x más luz que el lugar más oscuro. Está bien porque cuanto mayor sea el contraste, más desafiante será para tus ojos.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Cuál es la diferencia entre la imagen RGB y la imagen de profundidad?
Una imagen RGB-D es simplemente una combinación de una imagen RGB y su imagen de profundidad correspondiente. Una imagen de profundidad es un canal de imagen en el que cada píxel se relaciona con una distancia entre el plano de imagen y el objeto correspondiente en la imagen RGB.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Por qué Elon Musk es contra Lidar?
El primero es que es muy caro. El segundo, por otro lado, es casi filosófico. Musk mismo explicó que “montar lidas en el automóvil significa llenarlo con apéndices costosos. Pero en un automóvil, cada accesorio agregado es algo malo: es ridículo llenar el automóvil con estos dispositivos.
[wPremark_icon icon = “QUOTE-TE-SOT-2-SOLID” Width = “Width =” “” 32 “altura =” 32 “] ¿Por qué Tesla dejó de usar LiDAR?
También ha dicho que cualquier compañía que se basa en este tipo de tecnología está condenada. Argumenta que Lidar es demasiado caro y que mapear el mundo y mantenerlo al día son demasiado costosos. En cambio, Tesla se centra en los sistemas basados en la visión, que él cree que son más efectivos y rentables.

